Page - Home – IT Services
WHAT IS NAVIT
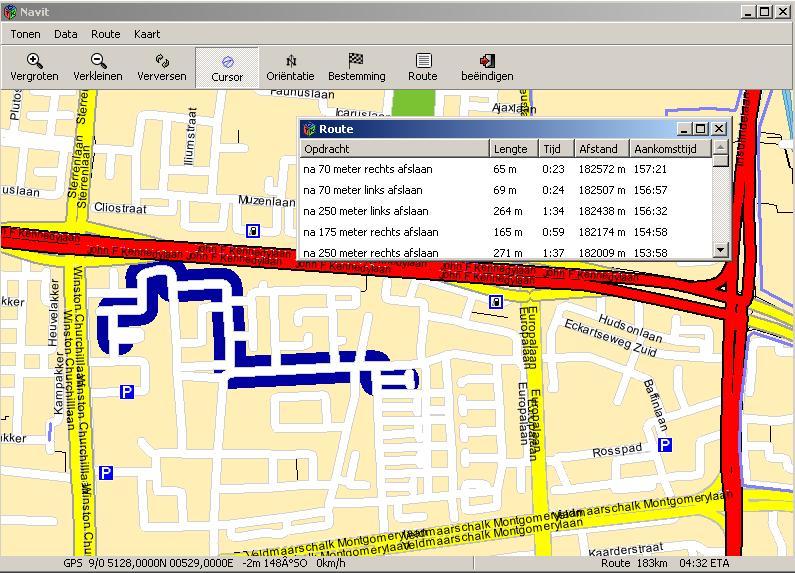
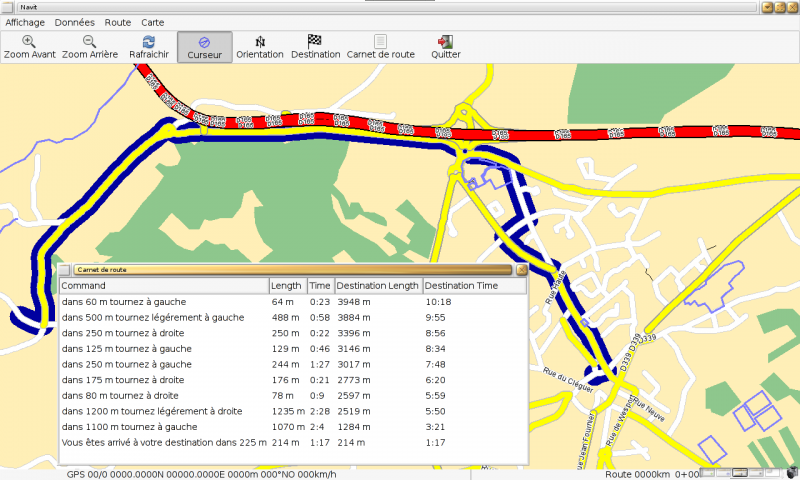
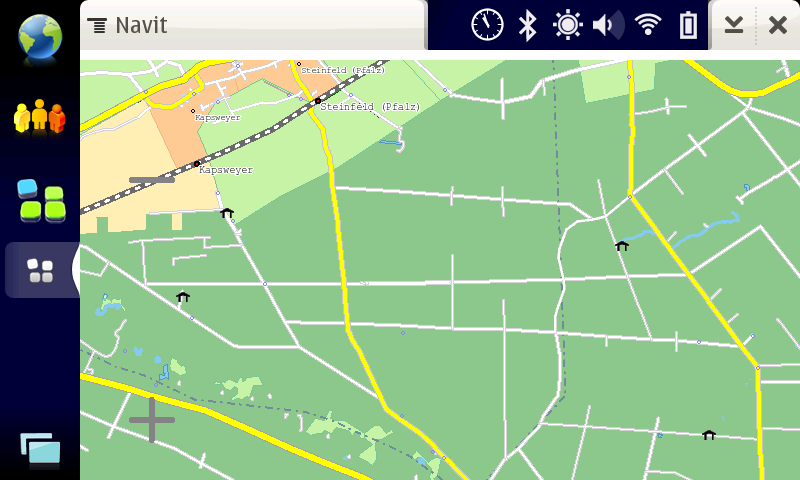
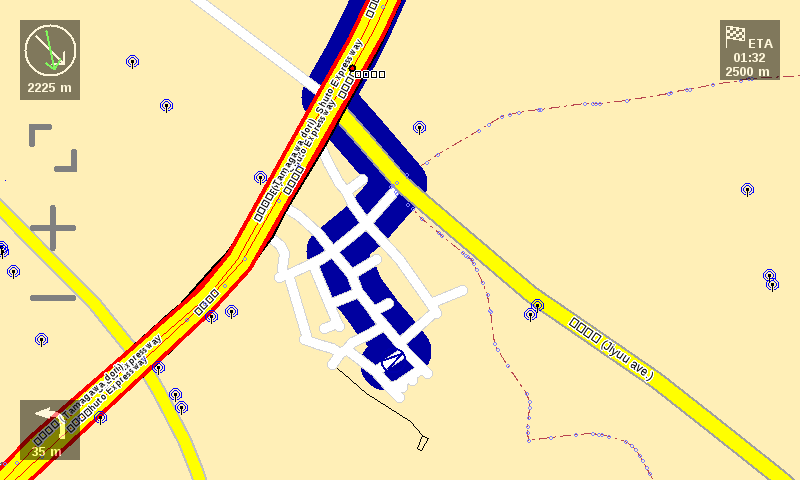
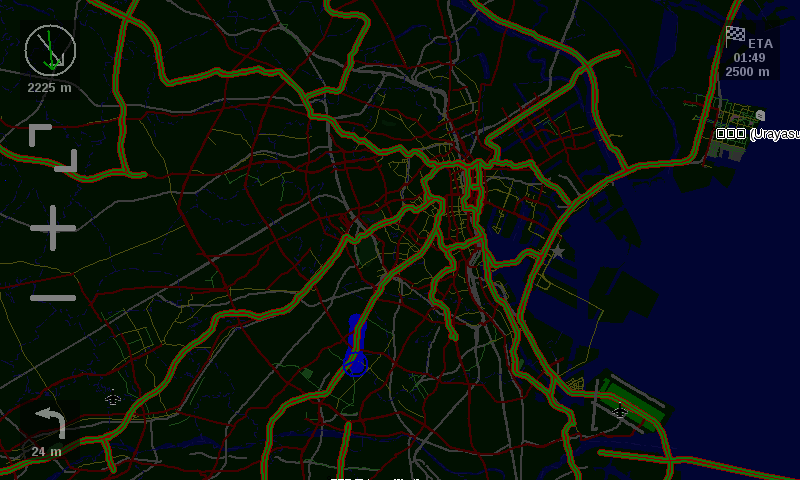
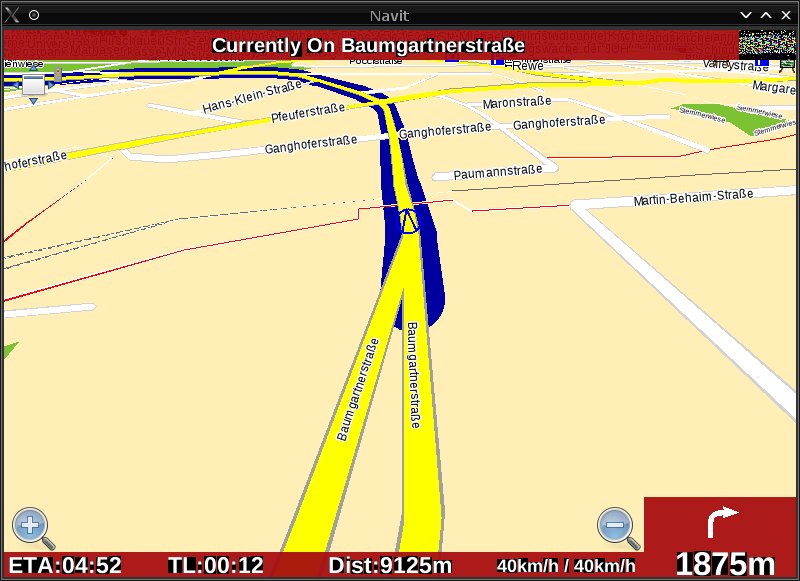
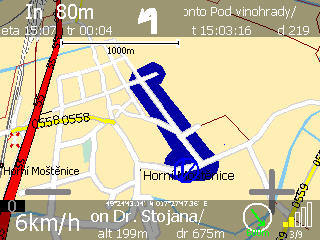
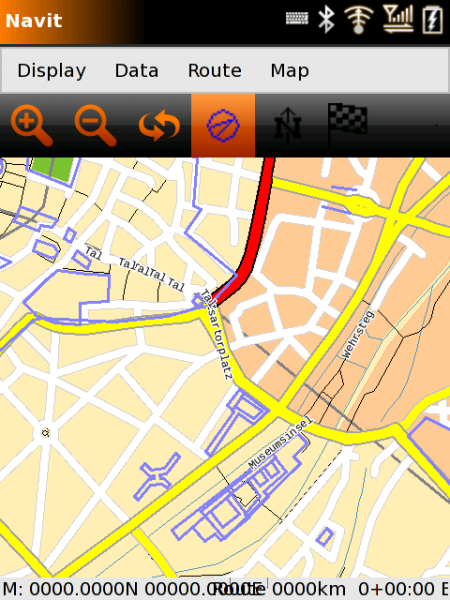
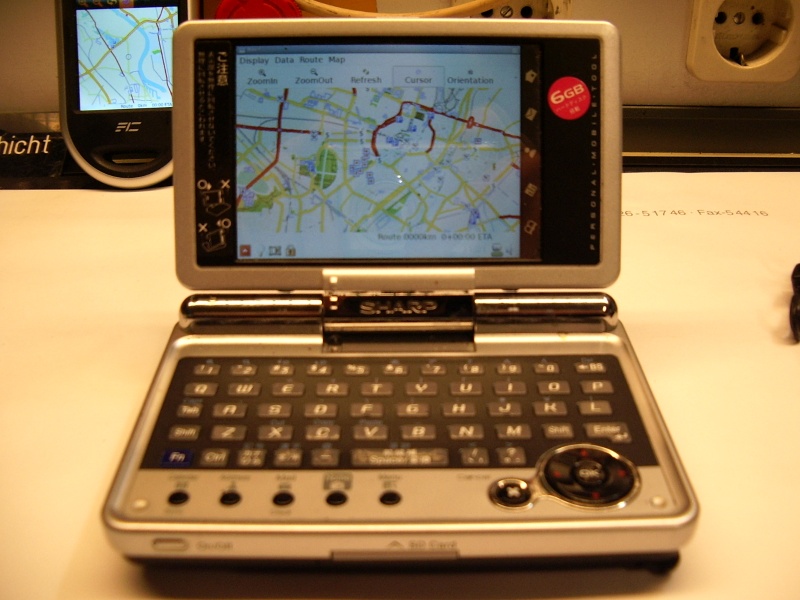
Navit is a car navigation system with routing engine. Navit's modular design is capable of using vector maps of various formats for routing and rendering on the screen. It's even possible to use multiple maps at the same time. The GTK+ or SDL user interfaces are designed to work well with touch screen displays. Points of Interest of various formats are displayed on the map. The current vehicle position is either read from gpsd or directly from NMEA GPS sensors. The routing engine not only calculates an optimal route to your destination, but also generates directions and even speaks to you using espeak. Navit currently speaks 49 languages, can run on various platforms (Linux, Windows, Android, OpenMoko Freerunner, Wince, Nokia n800 Internet tables, iPhone, Zaurus..)
WHY USE NAVIT
Privacy
User Friendly
HOW IT WORKS
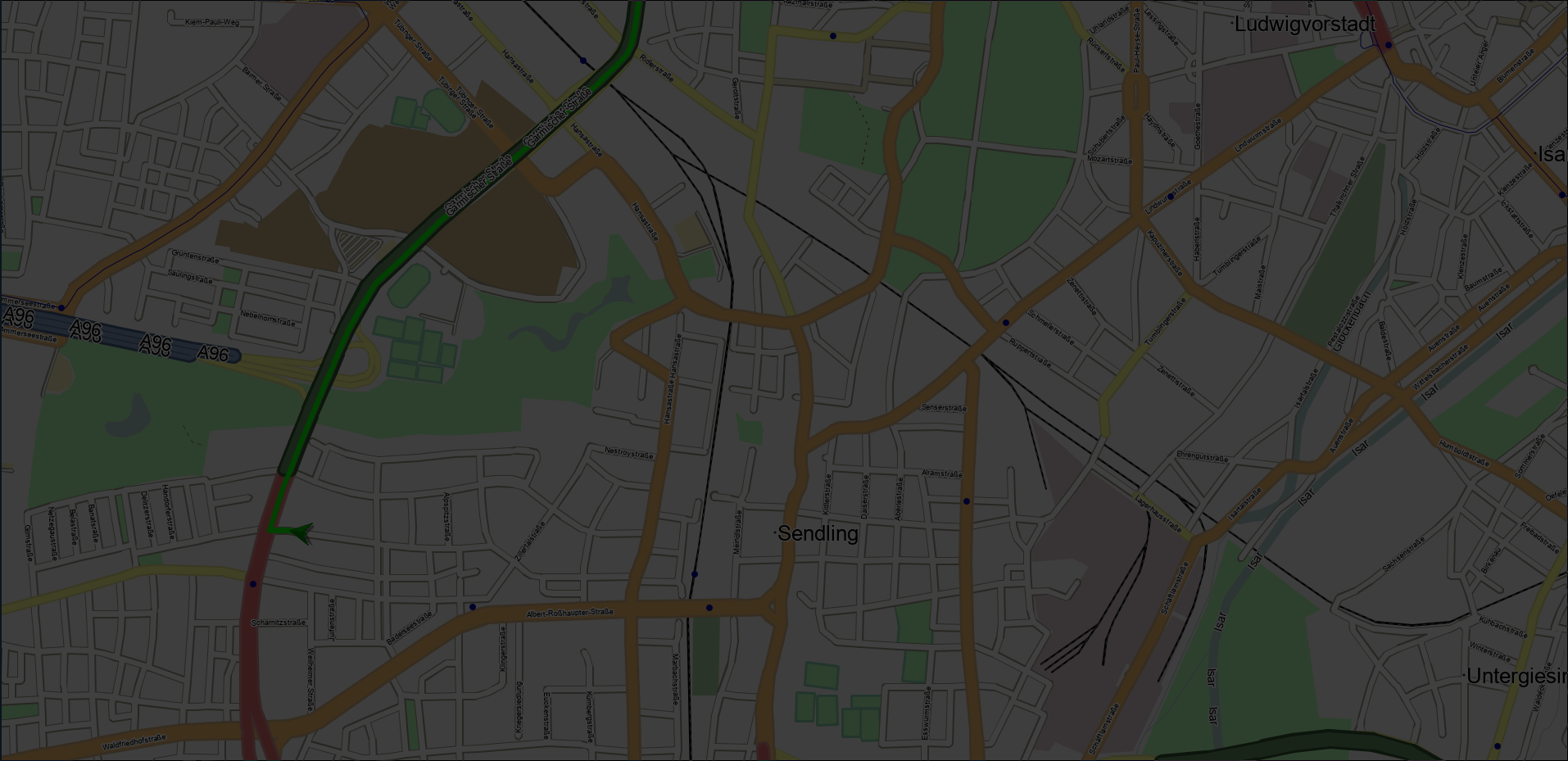
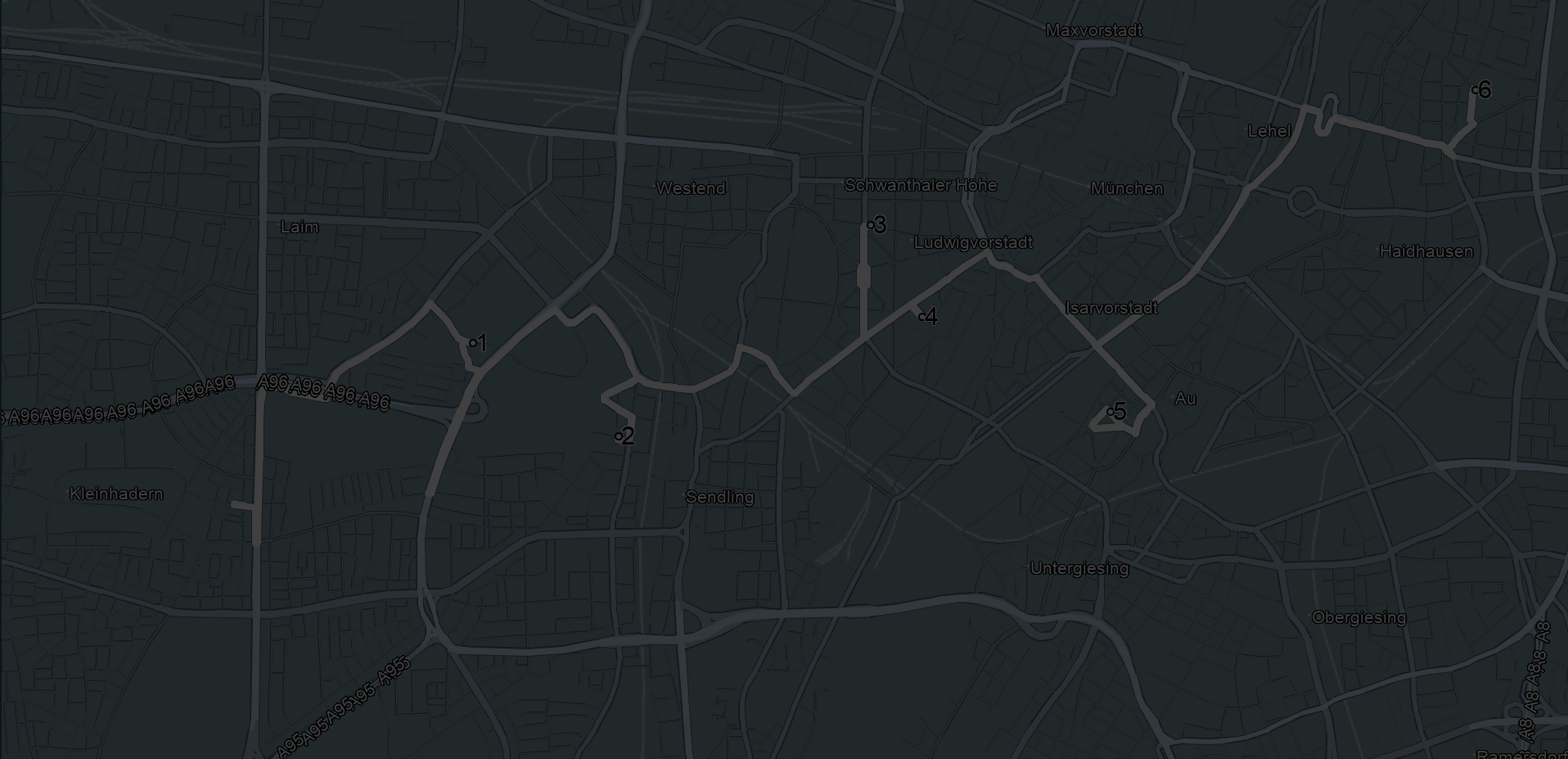
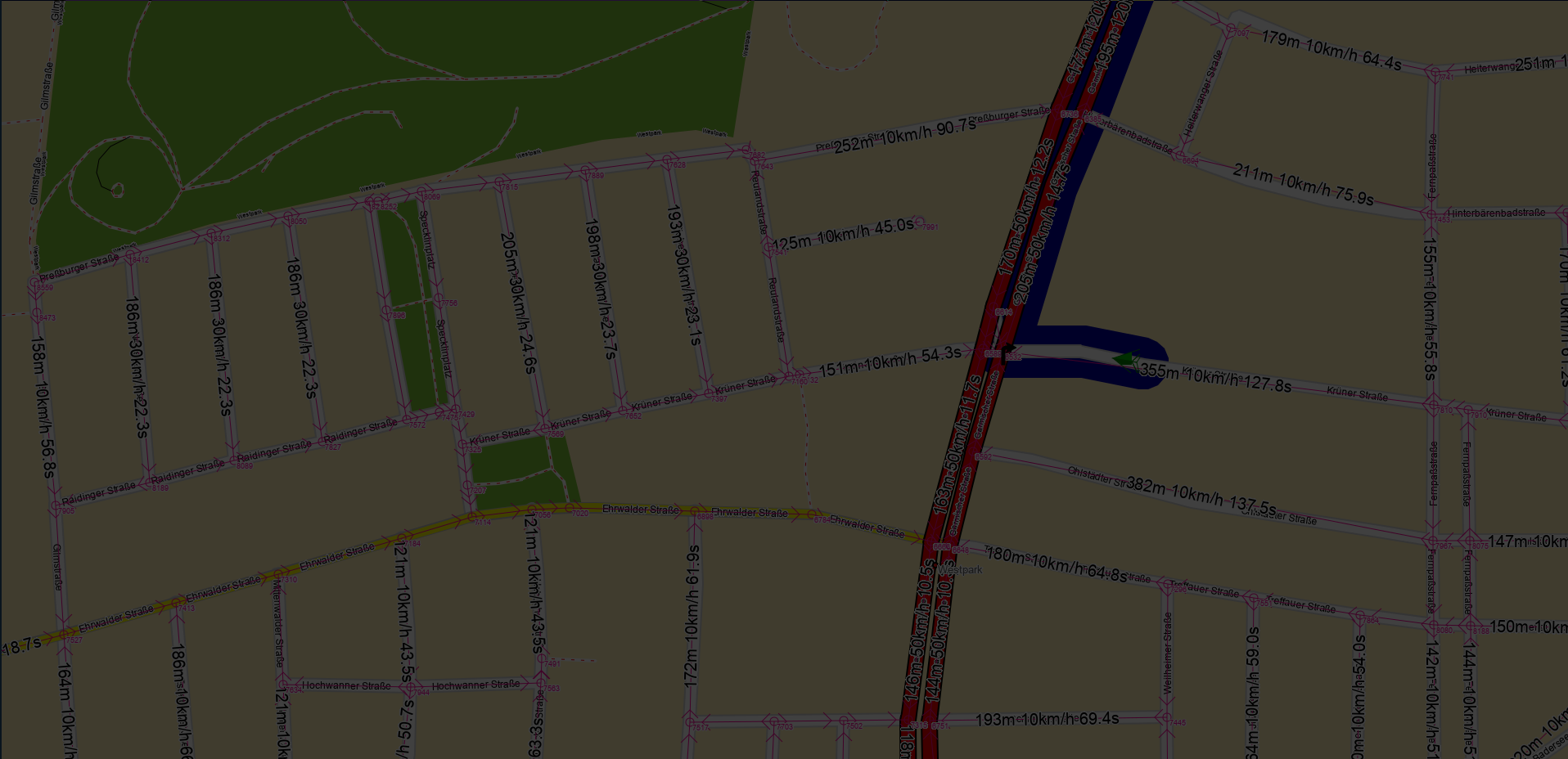
Navit uses a Dijkstra algorithm for routing. The routing starts at the destination by assigning a value to each point directly connected to destination point. The value represents the estimated time needed to pass this distance.
Now the point with the lowest value is choosen using the Fibonacci heap and a value is assigned to connected points whos are unevaluated or whos current value ist greater than the new one.
The search is repeated until the origin is found.
Once the origin is reached, all that needs to be done is to follow the points with the lowest values to the destination.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
DONATE
We are an opensource project with no fundings. If you like our project and want to inspire us you can donate us.